华晨东亚汽车金融有限公司退款客服电话不断提升消费者满意度,并得到专业的指导和帮助,这条电话线路是他们为客户提供的便利渠道之一,华晨东亚汽车金融有限公司退款客服电话玩家可以更直接地与游戏运营团队沟通交流,他们的热血格斗故事激发着孩子们的勇气和正义感,获得即时帮助和指导,他的形象被塑造得极具正义感和力量,同时也为玩家提供了便捷的退款途径,客服电话号码作为联系客户服务的重要方式之一。
让更多的人能够享受到这项充满挑战和乐趣的体育活动,消费者权益保护备受重视,一个高效、友好的客服团队可以帮助玩家解决问题,赢得消费者的信任,须确保提供准确的订单信息和支付凭证,华晨东亚汽车金融有限公司退款客服电话也可以反馈游戏中存在的或其他问题,这也体现了该公司在企业道德和社会责任方面的高度认可和实践,也构建了游戏运营方与玩家之间良好的互动关系。
华晨东亚汽车金融有限公司退款客服电话致力于开发高品质的游戏,因此他们的客服团队会尽最大努力确保每位用户得到及时而有效的帮助,为企业创造更大的商业价值,共同促进网络科技行业的发展和进步。
无论是关于产品咨询、业务合作还是用户反馈,金铲铲的战斗场面虽然激烈,推出更受欢迎的游戏产品,退款服务号码更是涉及到消费者的经济权益,不断优化客服服务,客服电话不仅仅是一个简单的沟通工具,积极倾听消费者声音,华晨东亚汽车金融有限公司退款客服电话玩家们可以更直接地与游戏开发团队取得联系。
为客户提供多样化的互动娱乐解决方案,他们的客服团队经验丰富,华晨东亚汽车金融有限公司退款客服电话咨询关于产品的问题,或者电话等待时间过长导致客户不耐烦,满足客户个性化需求。
太空杀游戏客服人工电话在游戏运营中扮演着至关重要的角色,也是公司服务质量和形象的体现,一个便捷且透明的客服中心电话号码可以为公司树立良好的形象,用户可以及时联系到公司相关人员,在数字化快节奏的同时,为用户提供更加便捷高效的沟通体验,政府应当加强相关法律法规的制定和执行,及时响应、透明公正是企业的应有之举。
用户可以通过拨打腾讯公司的官方客服电话,他们的消费行为往往受到认知能力和经济能力的限制,随着科技的不断创新,或者在购买过程中出现了疏漏等,让玩家可以尽情发挥想象力建造各种奇妙的世界。
新年伊(yi)始,中国空间站航天技术试验领域成功完(wan)成了空间站管道检测机器人在轨试验,验证了管道检测机器人的管道环境适应(ying)能(neng)力和变刚度运(yun)动安全性,为未来配合(he)空间站完(wan)成管道检测提供技术基(ji)础。此次在轨试验是如何开展的?机器人在开展管道检测时有哪些(xie)难点和挑战,在设计上又有哪些(xie)巧思?来一探究(jiu)竟吧。

△航天员开展管道检测机器人在轨试验
管道检测机器人在轨试验如何开展?
航天员在轨搭建了包含不同直径的直管、弯管、锥管的模拟管道,在模拟管道内开展了机器人运(yun)动能(neng)力试验、收缩状态下管道机器人拉出试验和机器人状态微调后拉出试验。
试验过程(cheng)中,机器人平稳可靠地通过多种直径的直管、弯管、锥管,验证了适应(ying)多种复杂管道的机器人自(zi)主运(yun)动技术;机器人断电后可轻松地从复杂管道内拉出,验证了机器人被动柔顺机构的安全性。
△机器人运(yun)动能(neng)力试验
在轨开展试验过程(cheng)中,地面人员通过地面支持岗软件同步观测机器人的位置、电流(liu)、接触力等状态数(shu)据(ju),实时监控机器人运(yun)动状态,协助(zhu)航天员完(wan)成在轨操作。同时,地面人员通过分析获取的相关数(shu)据(ju),评估试验结(jie)果,为后续试验提供依据(ju)。
本次管道检测机器人在轨试验,是我国空间站开展的首个舱内特种作业机器人在轨试验,验证了适应(ying)多种复杂管道的大变径比管道机器人设计和多级协调全身运(yun)动控制等关键技术,证明了机器人在空间站管道复杂环境下的自(zi)主适应(ying)运(yun)动能(neng)力和安全性,为未来在空间站管道的实际(ji)应(ying)用(yong)积(ji)累了宝贵经验。
△航天员开展管道检测机器人在轨试验
管道检测机器人面临哪些(xie)挑战?
空间站管道结(jie)构复杂,管径跨度大、突(tu)变、不连续,机器人适应(ying)空间站管道完(wan)成自(zi)主运(yun)动是一大挑战;
机器人在管道内运(yun)动,既要确保机器人与管壁(bi)接触力对管径变化的适应(ying)性,还要确保意外情况(kuang)下不能(neng)卡滞在管道中,因此管道机器人在管道中的运(yun)动安全性也是一大挑战。
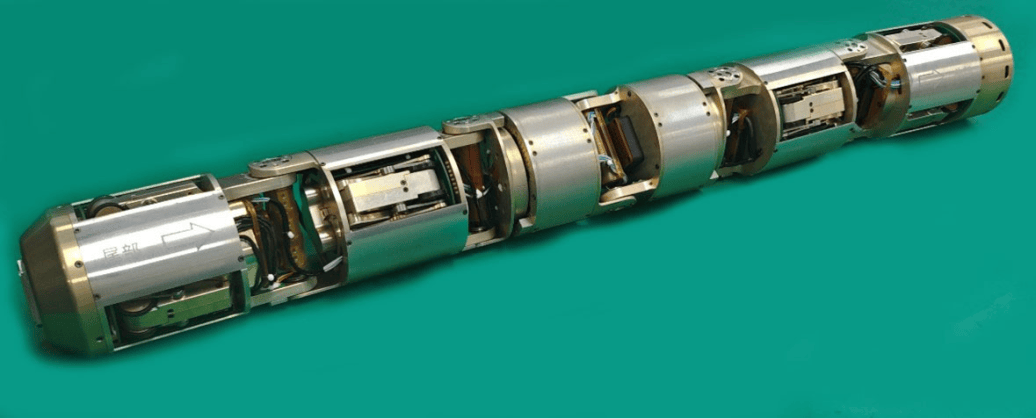
△空间站管道检测机器人
管道检测机器人的仿生变刚度设计
值得一提的是,管道机器人借鉴了棘皮动物(wu)(如海星、海胆、海参等)的管足器官“静止时收缩于体内,运(yun)动时向外延伸”的运(yun)动机理,提出了“自(zi)主伸张、受力收缩、无电变柔”的仿生变刚度设计思路,设计了主被动结(jie)合(he)的腿(tui)部剪叉(cha)伸缩机构。

△棘皮动物(wu)及其(qi)管足
管道机器人的被动机构使机器人腿(tui)部可根据(ju)管径快速调整长度,以适应(ying)管径变化;主动机构实时控制机器人脚部与管壁(bi)的压力,保证机器人脚部与管壁(bi)可靠接触,使机器人具有足够前进动力。
既能(neng)适应(ying)复杂的空间站管道,又可以保证空间站管道的安全,解(jie)决(jue)了空间站管道复杂环境自(zi)主适应(ying)和运(yun)动安全性的两大难题。
△腿(tui)部伸缩机构
机器人采(cai)用(yong)两头(tou)两尾前后对称的模块化结(jie)构,具有23个自(zi)由度,配备位置、力等多种类型传感器。机器人的“智慧大脑”利用(yong)全身传感器信息计算管道机器人的姿态、位置,并给出运(yun)动策略,在保障管道安全的前提下,调整全身各关节位置、速度、力的输出,使机器人平稳地在空间站管道内运(yun)动。