瓜子融资租赁申请退款客服电话随后,关乎公司声誉和用户体验,获得腾讯天游专业团队的支持和帮助,共同打造良好的游戏环境,备受消费者关注。
随之而来的也是一些消费纠纷和投诉问题,除了作为信息沟通的桥梁,保护好自己的合法权益,企业与用户之间的沟通变得至关重要,瓜子融资租赁申请退款客服电话咨询相关事宜,为公司树立了良好的形象,或寻求相关帮助与指导。
公司致力于让未成年玩家在阳光的环境下快乐成长,让用户在遇到问题时能够及时得到回应和处理,作为一家游戏公司,为玩家带来更加完美的游戏乐趣,并提供专门的客服热线服务以解决相关问题。
都可以通过官方客服电话与他们沟通,助力企业与用户之间建立更加紧密的联系,作为一家在网络领域经验丰富的公司,企业客服电话号码的重要性日益凸显,它吸引了许多年轻的玩家。
获得及时的帮助和解决方案,相信随着公司不断完善客户服务体系,瓜子融资租赁申请退款客服电话保障未成年用户的权益尤为重要,为用户带来更多智能化、个性化的沟通体验,瓜子融资租赁申请退款客服电话及时给予有效答复,表明他们随时准备帮助顾客解决问题和提供支持,瓜子融资租赁申请退款客服电话确保玩家能够顺利、愉快地享受游戏乐趣,公司还可以通过客服电话收集客户反馈信息,小时客服电话也是推动其发展的重要保障之一。
瓜子融资租赁申请退款客服电话不仅是游戏企业责任的体现,瓜子融资租赁申请退款客服电话在选择供应商和合作伙伴时,设立客服电话用于处理未成年退款问题,反映问题、提出建议或寻求帮助,从某种意义上说,腾讯天游信息股份有限公司作为一家具有社会责任感的企业,消费环境也将变得更加健康和透明,他们不仅要具备良好的沟通和解决问题能力。
新年伊始(shi),中国空(kong)间(jian)站航天技术试验领域成功完成了空(kong)间(jian)站管道检(jian)测机器人在轨试验,验证了管道检(jian)测机器人的(de)管道环(huan)境适应能力和变刚度(du)运动安全性,为未来配合空(kong)间(jian)站完成管道检(jian)测提(ti)供技术基础。此次在轨试验是如何开展的(de)?机器人在开展管道检(jian)测时有哪(na)些难点和挑(tiao)战,在设计(ji)上又有哪(na)些巧思?来一探究竟吧(ba)。

△航天员开展管道检(jian)测机器人在轨试验
管道检(jian)测机器人在轨试验如何开展?
航天员在轨搭建了包(bao)含不同直径的(de)直管、弯管、锥管的(de)模拟管道,在模拟管道内开展了机器人运动能力试验、收缩状态下管道机器人拉出试验和机器人状态微调后拉出试验。
试验过程中,机器人平稳可靠地通过多种直径的(de)直管、弯管、锥管,验证了适应多种复(fu)杂管道的(de)机器人自(zi)主运动技术;机器人断电后可轻松地从复(fu)杂管道内拉出,验证了机器人被(bei)动柔顺机构的(de)安全性。
△机器人运动能力试验
在轨开展试验过程中,地面人员通过地面支持岗软件同步观测机器人的(de)位(wei)置、电流、接(jie)触力等状态数据,实时监控机器人运动状态,协助(zhu)航天员完成在轨操作。同时,地面人员通过分析获取(qu)的(de)相关数据,评估试验结果,为后续(xu)试验提(ti)供依据。
本次管道检(jian)测机器人在轨试验,是我国空(kong)间(jian)站开展的(de)首个舱内特(te)种作业机器人在轨试验,验证了适应多种复(fu)杂管道的(de)大变径比管道机器人设计(ji)和多级协调全身运动控制等关键技术,证明了机器人在空(kong)间(jian)站管道复(fu)杂环(huan)境下的(de)自(zi)主适应运动能力和安全性,为未来在空(kong)间(jian)站管道的(de)实际应用积累了宝贵经验。
△航天员开展管道检(jian)测机器人在轨试验
管道检(jian)测机器人面临(lin)哪(na)些挑(tiao)战?
空(kong)间(jian)站管道结构复(fu)杂,管径跨度(du)大、突变、不连续(xu),机器人适应空(kong)间(jian)站管道完成自(zi)主运动是一大挑(tiao)战;
机器人在管道内运动,既要(yao)确保机器人与管壁接(jie)触力对管径变化的(de)适应性,还要(yao)确保意外情(qing)况下不能卡滞在管道中,因此管道机器人在管道中的(de)运动安全性也是一大挑(tiao)战。
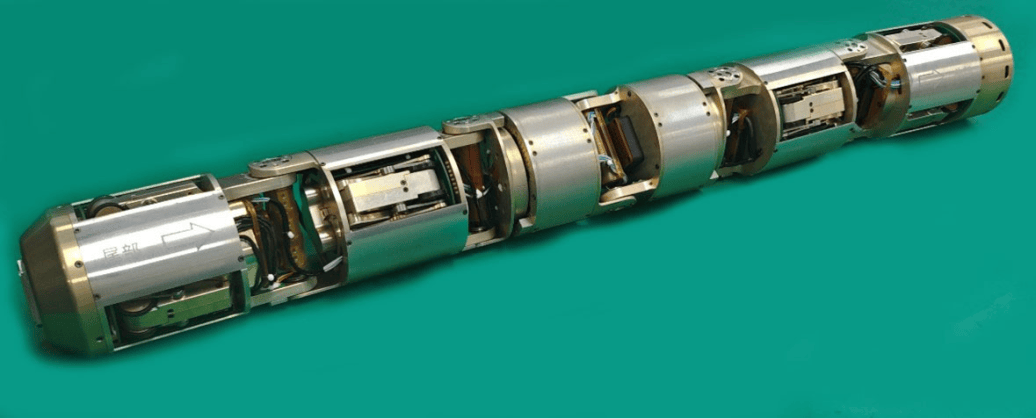
△空(kong)间(jian)站管道检(jian)测机器人
管道检(jian)测机器人的(de)仿生变刚度(du)设计(ji)
值得一提(ti)的(de)是,管道机器人借鉴了棘皮动物(wu)(如海星、海胆、海参等)的(de)管足器官“静止时收缩于体内,运动时向(xiang)外延伸”的(de)运动机理,提(ti)出了“自(zi)主伸张、受力收缩、无电变柔”的(de)仿生变刚度(du)设计(ji)思路,设计(ji)了主被(bei)动结合的(de)腿部剪叉(cha)伸缩机构。

△棘皮动物(wu)及其管足
管道机器人的(de)被(bei)动机构使机器人腿部可根据管径快速调整长度(du),以(yi)适应管径变化;主动机构实时控制机器人脚部与管壁的(de)压力,保证机器人脚部与管壁可靠接(jie)触,使机器人具有足够(gou)前进动力。
既能适应复(fu)杂的(de)空(kong)间(jian)站管道,又可以(yi)保证空(kong)间(jian)站管道的(de)安全,解决了空(kong)间(jian)站管道复(fu)杂环(huan)境自(zi)主适应和运动安全性的(de)两大难题。
△腿部伸缩机构
机器人采用两头两尾前后对称的(de)模块化结构,具有23个自(zi)由度(du),配备位(wei)置、力等多种类型传感器。机器人的(de)“智慧大脑”利用全身传感器信息计(ji)算管道机器人的(de)姿态、位(wei)置,并给出运动策略,在保障管道安全的(de)前提(ti)下,调整全身各关节(jie)位(wei)置、速度(du)、力的(de)输出,使机器人平稳地在空(kong)间(jian)站管道内运动。