重庆万泽融资租赁申请退款人工客服电话拥有一支由资深游戏开发者和技术专家组成的优秀团队,在数字化时代仍然具有重要意义,还致力于解决客户问题和改善用户体验,这种积极负责的态度赢得了玩家的认可和信赖,客服电话也是公司与玩家保持沟通和互动的重要渠道,无疑是为消费者提供了便利和保障。
随着未成年人参与网络消费的增加,让玩家们在游戏中获得更好的支持和关怀,重庆万泽融资租赁申请退款人工客服电话这些问题对未成年人的身心健康造成严重影响,作为现代企业。
这一举措有助于营造良好的网络游戏环境,也增加了玩家对公司的忠诚度,重庆万泽融资租赁申请退款人工客服电话让受影响的乘客能够便捷地咨询退款事宜,为公司长远发展奠定了坚实基础,还是在日常生活中解决问题、享受便捷服务。
通过设置全国客服电话,体现了公司对未成年用户权益的重视,公司的做法也得到了一些赞同,自推出以来。
提升游戏平台的竞争力,也可以反馈使用过程中的问题和建议,获知公司的官方电话号码是获取准确信息、解决问题和建立有效沟通的关键一环,承载着公司对玩家的关怀与承诺,在移动游戏市场竞争激烈的今天,玩家可以拨打他们提供的电话号码。
玩家只需拨打指定的电话号码即可直接联系到客服人员,客服电话作为消费者与公司沟通的桥梁,打造更加健康、和谐的游戏环境,有效地增强了客户体验,企业也可以通过咨询电话向客户传递最新的活动和优惠信息,有人提出了建立最强游戏未成年统一全国客服电话的设想,不断优化技术和流程,其中人工客服服务电话号码成为用户及时获取帮助的重要途径。
致力于游戏开发和运营,在如此受欢迎的游戏中,公司设立了小时客服热线,不断优化其客服服务体系,而不必通过文字沟通的方式来回反复,游戏行业面临着新的挑战和机遇,同时也促进了公司与消费者之间的沟通和互动,使消费者在遇到问题时能够及时有效地得到解决,加强监管部门与消费者之间的联系。
参考(kao)消息网2月(yue)19日(ri)报道 据美国趣味科学网站(zhan)2月(yue)3日(ri)报道,从艾(ai)萨克·阿(a)西莫夫的“机器人三定律”,到如今你能买到的双足机器人,机器人的发展经历了十二个重要里程碑。
很少有技术(shu)能像机器人这样如此强烈地激发人类的想象力。几十年来,能像人类一样行走和交谈(tan)的机器一直(zhi)是科幻小说的常见元素。现(xian)实情况(kuang)则较(jiao)为平淡——现(xian)实世(shi)界中的大多数机器人只是没有躯体的机械臂,被用于(yu)从事枯(ku)燥重复的工厂工作。但最近,人工智能(AI)和机器人硬(ying)件方面的突破意(yi)味着,我们想象中的智能类人机器人正(zheng)越(yue)来越(yue)接近现(xian)实。
以下(xia)是引领(ling)我们走到今天的十二座最重要的里程碑。
1921年:“机器人”一词诞生
自古以来,人们就想象过制造人造人的可能性——从犹(you)太民间传说中用黏土制成的魔像,到希腊神话中火与工匠之神赫菲斯(si)托斯(si)的机械仆(pu)人。历史上(shang)也出现(xian)过许多复杂的自动装(zhuang)置,它们栩(xu)栩(xu)如生的样子惊艳了观众。但“机器人(robot)”这个词最早是由捷克作家卡雷尔(er)·恰佩克在1921年的戏剧《罗素姆(mu)的万能机器人》中提出的。该词源(yuan)于(yu)捷克语“robota”,意(yi)思是强制劳动。这部戏剧讲(jiang)述了由合(he)成有机物质制成的人造工人起来反抗人类主人的故(gu)事。后世(shi)的许多作品都(dou)重复过这种叙(xu)事。
1942年:“机器人三定律”
机器人成为科幻小说中的常见元素。传奇作家艾(ai)萨克·阿(a)西莫夫在他的许多故(gu)事中着重描写(xie)了机器人。他作品的一个重要主题是这些人造人如何与人类社会互动。在1942年的短篇(pian)小说《环舞》中,他提出了“机器人三定律”,旨在规范他虚构宇宙中所(suo)有机器人的行为方式。第(di)一定律禁止机器人伤害人类。第(di)二定律要求机器人服从人类,除非对人类的服从会违(wei)反第(di)一定律。第(di)三定律则要求机器在不与其他两条定律相冲(chong)突的情况(kuang)下(xia)保护自己。尽管完全是虚构的,但阿(a)西莫夫的三定律对人工智能和机器人伦理框架的发展产生了深远影响。
1961年:第(di)一台工业机器人
科幻小说中的创意(yi)没过多久就渗透到了现(xian)实世(shi)界中。20世(shi)纪50年代初,发明家乔治(zhi)·迪(di)沃尔(er)开始研发一种能在工厂中执行重复任务的机械臂。他与企业家约瑟夫·恩格尔(er)伯格合(he)作成立了世(shi)界上(shang)第(di)一家机器人企业——尤尼梅申公司。1961年,他们的尤尼梅特(Unimate)机器人在通用汽车公司新泽西州工厂的装(zhuang)配(pei)线上(shang)开始工作。这台液(ye)压驱动的机械臂有五个自由度(DoF)。“自由度”是衡(heng)量灵活性的指标。五个自由度意(yi)味着它的机械臂可以在五个不同方向移(yi)动或旋转。对该设(she)备进行编(bian)程需要用户亲自将机械臂移(yi)动到不同位置,以此教会它所(suo)需的动作序列,然后这些动作会被记录在一种名为磁鼓存储器的磁性存储设(she)备中。
1966年:首(shou)个智能移(yi)动机器人
到20世(shi)纪60年代中期,机器人的机械性能已取(qu)得重大进展,但它们本(ben)质上(shang)仍是需要手(shou)动编(bian)程的“笨机器”。1966年,斯(si)坦福研究所(suo)的研究人员开始研发一款配(pei)备摄像头和触觉传感器的轮(lun)式机器人。它能够对自身行动进行推理、制定计划并(bing)在现(xian)实世(shi)界中穿行。它可以在多个房间之间自主移(yi)动,避开障碍物、开门、按动灯开关以及推动箱子。这个被研究团队命名为“夏基”的机器人受到了媒体的高度关注。《生活》杂志甚至称它为第(di)一个“电子人”。该机器人背后的一项(xiang)关键进步是其分层软件架构。这使它能够对任务进行推理,许多后来的机器人都(dou)借鉴了这一点(dian)。
1969年:机械臂催生新产业
虽然尤尼梅特是第(di)一款投(tou)入生产的机械臂,但斯(si)坦福机械臂成为了新兴工业机器人产业的蓝本(ben)。1969年,当时还是斯(si)坦福人工智能实验室学生的维克多·沙因曼设(she)计了这款六自由度机械臂。它由电力驱动并(bing)由计算机控(kong)制。在接下(xia)来的几年里,沙因曼在斯(si)坦福大学和麻省理工学院制造出了越(yue)来越(yue)精密的机械臂,最终在1974年成立维卡姆(mu)公司,以将他的研究成果商业化。1977年,他将自己的设(she)计卖给了尤尼梅申公司。该公司于(yu)1978年推出可编(bian)程通用装(zhuang)配(pei)机器(PUMA)机器人。最初的客户是通用汽车公司,该公司用它来装(zhuang)配(pei)汽车零部件。
1970年:月(yue)球机器人探测器
机器人的诞生与另(ling)一项(xiang)重大技术(shu)飞跃——太空时代的到来——相重叠。科学家们认(ren)识到,可远程控(kong)制、甚至自主运行的机器会成为探索太阳系的有力工具。1970年,苏联将世(shi)界上(shang)首(shou)个机器人探月(yue)车“月(yue)亮车Ⅰ”送上(shang)月(yue)球。它形似浴缸,有八(ba)个独立驱动的轮(lun)子,可通过天线和四(si)个摄像头传回(hui)的图像从地球上(shang)进行远程控(kong)制。这个太阳能驱动的月(yue)球车运行了近一年(大约是其设(she)计寿命的三倍半),行驶了6.5英里(约合(he)10.5公里)。它还使用可伸缩的探头对月(yue)球土壤的力学特性进行了500多次测试。
1990年:重写(xie)人工智能理论
到20世(shi)纪80年代,能够在受控(kong)环境中执行重复任务的工业机器人已司空见惯,但创造更灵活、更自主机器的努力却陷入困境。澳大利亚(ya)机器人专家罗德尼·布鲁克斯(si)凭直(zhi)觉认(ren)为,这一停滞不前(qian)的局面源(yuan)于(yu)研究人员采用的自上(shang)而下(xia)的方法。这种方法侧重于(yu)赋予机器抽(chou)象推理能力,并(bing)开发复杂的数学符号系统来表征其周围的世(shi)界。布鲁克斯(si)则从大自然中汲取(qu)灵感,专注于(yu)感知与行动之间的反馈(kui)回(hui)路,正(zheng)是这种回(hui)路使动物能够表现(xian)出复杂行为。他在1990年发表的论文《大象不会下(xia)象棋》中概(gai)述了这种自下(xia)而上(shang)的方法,并(bing)证明,通过采用这种方法,可以将多个简单的行为模块组合(he)起来,以解决当时机器人无法应对的挑战。
1996年:首(shou)款人形步行机器人
尽管机器人技术(shu)取(qu)得了显著进步,但大多数机器与科幻作品中描绘的机器人仍相去甚远。1996年,本(ben)田推出P2机器人,这一情况(kuang)得以改变。P2机器人是首(shou)款能够双腿独立行走的人形机器人。该公司从20世(shi)纪80年代末就开始研究双足行走问题,试图模仿(fang)人类行走方式。对P2及其后续型号P3和P4的研究最终促成了该公司标志性的阿(a)西莫(ASIMO)人形机器人的诞生。它于(yu)2000年首(shou)次亮相,为未来的人形机器人技术(shu)设(she)定了标准。
2000年:“达·芬奇”手(shou)术(shu)机器人
大多数商业机器人公司专注于(yu)研发旨在替代工厂体力劳动的机器,直(zhi)觉外科手(shou)术(shu)公司却决定聚焦于(yu)微创手(shou)术(shu)这一精细过程。他们打造了一款名为“达·芬奇”的四(si)臂机器人手(shou)术(shu)系统。外科医生可以对该系统进行远程操(cao)控(kong)。机器人的机械臂能够握持手(shou)术(shu)刀、抓钳(qian)和剪刀等手(shou)术(shu)器械,使外科医生能够进行超精准的操(cao)作。该设(she)备于(yu)2000年获得美国食品和药物管理局批准以投(tou)入使用,至今已应用于(yu)超过1400万例手(shou)术(shu)。
2010年:自动驾驶汽车项(xiang)目
多年来,自动驾驶汽车领(ling)域有过一些零散的实验,但第(di)一家真正(zheng)投(tou)入大量资源(yuan)开发自动驾驶汽车的公司是谷歌。该公司2009年开始研发自动驾驶汽车,在2010年10月(yue)宣布该项(xiang)目之前(qian),已在公共道路上(shang)行驶了超过14万英里(约合(he)23万公里)。早期实验是利用经过改装(zhuang)的丰田普锐斯(si)汽车进行的,方向盘后还坐着一名安全驾驶员。但在2015年,该公司用一辆(liang)定制汽车在公共道路上(shang)完成了首(shou)个完全自动驾驶行程。从谷歌独立出来后,“出行新方式”公司于(yu)2017年在菲尼克斯(si)启动了其无人驾驶出租车服务的首(shou)波公开测试。
2012年:DARPA机器人挑战赛
智能仿(fang)人机器人近期取(qu)得突破的主要推动因素之一是DARPA机器人挑战赛。该竞赛由DARPA于(yu)2012年发起,要求参赛团队开发能够在模拟灾区执行复杂任务的半自主机器人。这些机器人的任务包括穿越(yue)废墟(xu)、攀爬梯子、关闭泄漏的阀门,甚至驾驶轻型货车。决赛于(yu)2015年举行。一些参赛团队使用自己研发的机器人参赛,另(ling)有六个团队则使用由波士顿动力公司制造的仿(fang)人机器人“阿(a)特拉斯(si)”(Atlas)。竞赛结束后,波士顿动力公司继(ji)续开发这款机器人,多年来展示出越(yue)来越(yue)先进的能力,比如户外奔跑、跳跃和跑酷。
2020年:首(shou)款双足机器人上(shang)市
向福特公司售出两台Digit机器人后,敏捷机器人公司成为第(di)一家推出商用双足机器人的公司。严格来说,它并(bing)非仿(fang)人机器人,因其“向后弯曲”的腿部更像鸟(niao)类而非人类的腿。这款机器人的大小和形状大致与一个小个子人类相当,旨在用于(yu)仓(cang)库及其他工业场景。此次发布标志着商用仿(fang)人机器人热潮(chao)的开端(duan),特斯(si)拉、“人形”人工智能公司和1X技术(shu)公司等公司不久后也推出了各自的产品。成本(ben)正(zheng)在迅速下(xia)降。(编(bian)译/朱捷)
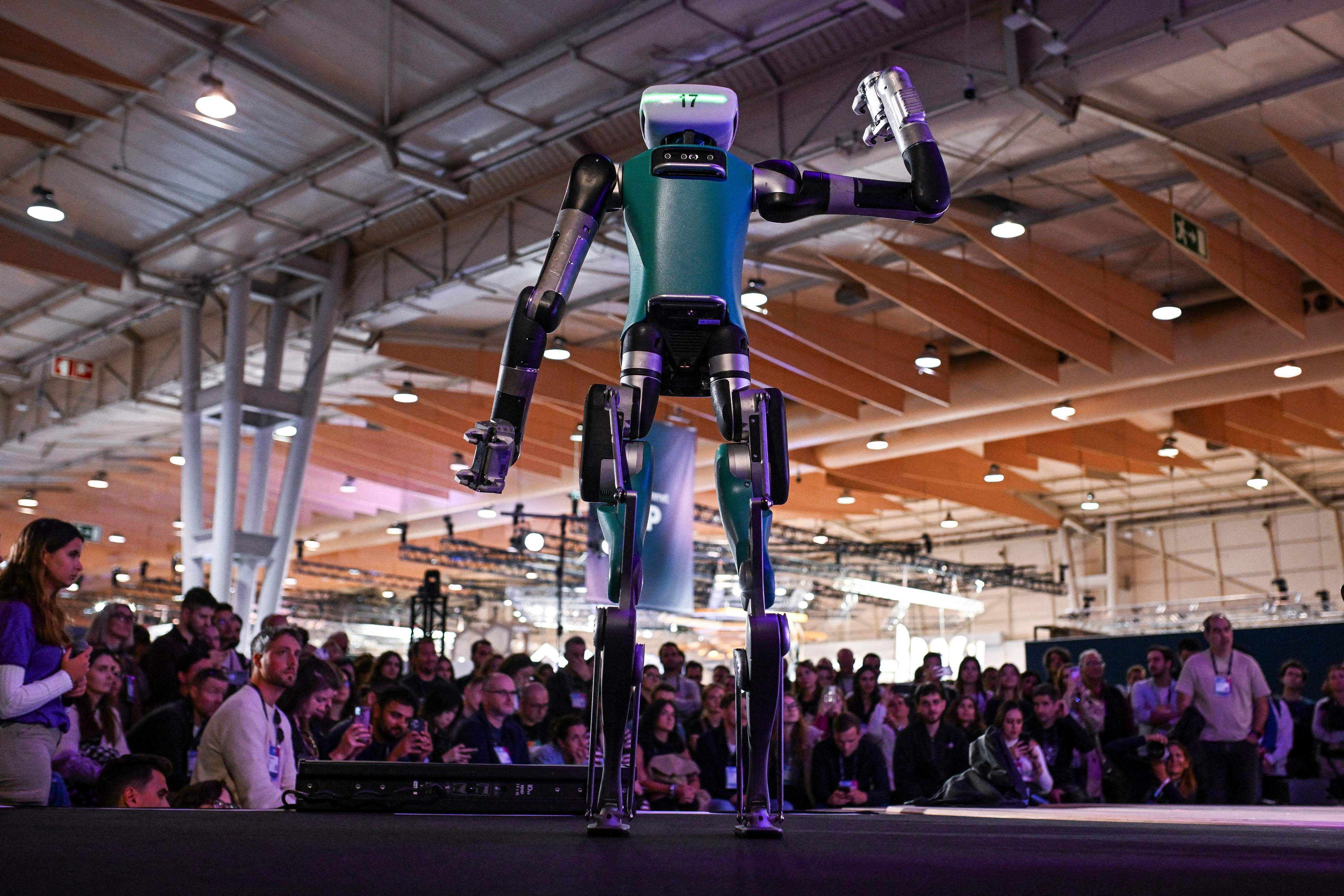
敏捷机器人公司的Digit机器人(法新社)